[강화학습] 동적계획법 (Dynamic Programming)
2022.10.31 - [분류 전체보기] - [강화학습] 문제해결전략
이전 글에 이어서 동적계획법에 대해 정리한다.
중첩되는 부분문제들(overlapping subproblems)
- 부문 문제 및 상위 부분 문제의 형태가 동일함.
- 문제의 크기만 변화 (실질적으로 다루고자 하는 문제의 형태는 동일)
- 문제를 정의했을 때, 원래 풀고자 한 문제도 정의가 되어야 함.
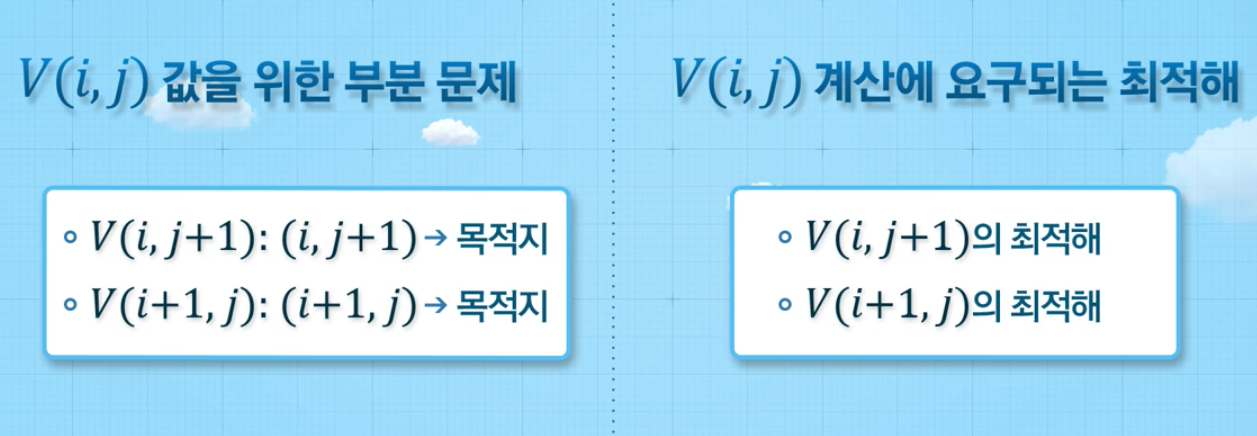
최적 부분구조(optimal substructure)
한 문제의 최적해는 그 부분 문제의 최적해로부터 구성
부분 문제의 최적해를 이용해 상위 문제 해결
V(i, j)값을 구하기 위해서 V(i, j+1), V(i+1, j)의 최적값을 이용해야 한다.

< 최적화의 원리 >
한 문제에 대한 해가 최적이라면 그 문제를 이루는 모든 부분 문제들에 해당하는 부분해가 부분 문제의 최적해
(확정적) 동적 계획법
어떤 상태에서 어떤 행동을 결정하면 그 다음 단계의 상태가 확정적으로 결정되는 경우
각 문제는 여러 단계(stage) 혹은 의사결정시점(decision epoch)로 나뉨 -> 의사결정을 내리는 시점
각 단계에서는 상태(state)를 바탕으로 의사결정(행동, action)이 이루어짐
$a_t$라는 행동을 했을 때, 다음 상태 $s_{t+1}$은 $f_t()$에 의해 결정이 된다.
또한, 어떤 상태에서 어떤 행동을 하면 그에 따른 보상을 $r_t()$라고 정의한다.
식으로 표현하면 아래와 같다.
$$ s_{t+1} = f_t(s_t, a_t)$$
$$ r_t = r_t(s_t, a_t) $$

$s_0$의 상태에서 $a_0$라는 행동을 취하면 $r_0$의 보상을 받고 $s_1$의 상태로 전이되며, 이 과정을 반복한다.
이제 어떤 행동을 선택할 것인지가 문제 !
즉, 초기 상태 $s_0$가 주어진 상황에서 T기간에 걸친 총 보상합($r_0+ r_1+\cdots+r_{T-1}$)을 최대화하기 위한
일련의 행동들($a_0,\ a_1,\ \cdots,\ a_{T-1}$)을 결정하는 것
Decision rule : 모든 가능한 상태에서 최적의 행동을 찾는 것. $\delta_t(s_t) = a_t$
Policy : 모든 단계에서의 decision rule의 집합. $\pi = \left\{ \delta_t \right\}_{t=0,1,\cdots ,T-1}$
역진귀납법
$v^*_t(s_t)$ : $v_t(x)$시점부터 남은 기간 획득 가능한 총 보상의 최대값
$$ v^*_t(s_t) = \displaystyle \max_{a_t,a_{t+1},\cdots ,a_{T-1}}\left\{r_t+r_{t+1}+\cdots +r_{T-1}\right\} $$
=> 궁극적인 목표는 $v^*_0(s_0)$를 구하는 것.
중첩되는 부분문제를 풀기 위해서는 벨만 최적 방정식을 사용하면 된다.
벨만 최적 방정식 (Bellman Optimality Equation)
$$v^*_t(s_t) = \displaystyle \max_{a_t}\left\{r_t(s_t,a_t)+v^*_{t+1}(f_t(s_t,a_t)) \right\}$$
역진귀납법에 벨만 최적 방정식을 사용하면 $v^*_0(s_0)$를 구할 수 있다.
역진 귀납법이란 가장 마지막 단계에 있는 문제부터 순차적으로 문제를 풀어 나가는 것.
① 모든 가능한 $s_{T-1}$에 대해 $v^*_{T-1}(s_{T-1})=\displaystyle \max_{a_{T-1}}r_{T-1}$을 계산한다.
② $t=T-2,\ T-3,\ \cdots,\ 1$의 순서로 모든 가능한 $s_t$에 대해 $v^*_{t}(s_{t})$를 계산한다.
③ 초기 상태 $s_0$에 대해, $v^*_0(s_0) = \displaystyle \max_{a_0}\left\{r_0(s_0,a_0)+v^*_{1}(s_1) \right\}$을 계산
이는 $ v^*_t(s_t) = \displaystyle \max_{a_t,a_{t+1},\cdots ,a_{T-1}}\left\{r_t+r_{t+1}+\cdots +r_{T-1}\right\} $와 동일
[참고]
http://www.kmooc.kr/courses/course-v1:KoreaUnivK+ku_ai_002+2020_A44/about